Was sind die drei Hauptkomponenten eines Gleichstrom-Servomotors?
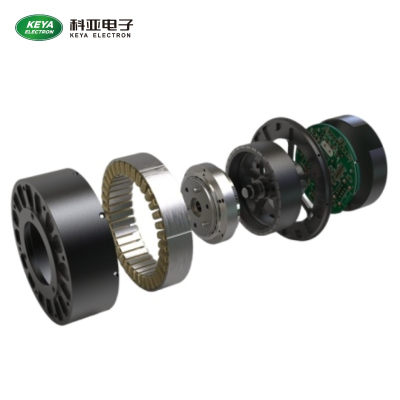
In Bereichen wie Spezialrobotern, Hubarbeitsbühnen und FTF spielen Gleichstrom-Servomotoren als zentrale Antriebskomponenten eine wichtige Rolle. Ihre Leistung beeinflusst direkt die Stabilität und Effizienz des Anlagenbetriebs. Ein Gleichstrom-Servomotor besteht aus Komponenten wie Passfedernuten, Vorderflanschen, Rotoren, Stator, Hinterflanschen, Bremsen, Encodern, Bürstenelementen und Kommutatoren. Er besteht im Wesentlichen aus drei Hauptteilen:

Stator
Der Stator besteht aus einem Eisenkern und Wicklungen. Sein magnetisches Feld wird durch die Magnetpole des Stators erzeugt. Je nach Art der Magnetfelderzeugung lassen sich Gleichstrom-Servomotoren in Permanentmagnet- und Fremderregermotoren einteilen. Permanentmagnetpole bestehen aus permanentmagnetischen Materialien, während Fremderreger durch Laminieren von gestanzten Siliziumstahlblechen gebildet werden. Beim Einschalten erzeugen die Wicklungen im Stator ein elektrisches Feld, wodurch Strom durch den Stator fließt. Durch die Kraft zwischen dem Stator und den Magneten an den Ankerpolen beginnt sich der Anker zu drehen. Die Drehrichtung des Motors lässt sich durch Ändern der Stromrichtung in der Wicklung steuern.

Rotor
Der Rotor, auch Anker genannt, besteht aus einem Eisenkern aus gestapelten Siliziumstahlblechen, in dessen Oberfläche Spulen eingebettet sind. Fließt der Ankerstrom durch den Kern, erzeugt er ein elektromagnetisches Drehmoment, das die Last unter der Einwirkung des Statormagnetfelds rotieren lässt. Rotorlager sind Komponenten, die den Rotor stützen und seine Stabilität und Drehfreiheit gewährleisten.

Bürsten und Kommutatorsegmente
Bürsten und Kommutatorsegmente sind Schlüsselkomponenten eines Gleichstrommotors. Sie arbeiten koordiniert, um sicherzustellen, dass das erzeugte elektromagnetische Drehmoment eine konstante Richtung behält, sodass sich der Rotor gleichmäßig und kontinuierlich in eine feste Richtung drehen kann. Die Bürsten sind an eine externe Gleichstromversorgung angeschlossen und die Kommutatorsegmente sind mit dem Ankerleiter verbunden. Während der Drehung des Rotors wechseln die Bürsten und Kommutatorsegmente daher ständig und kommen in Kontakt. Stellen Sie sicher, dass sich die Stromrichtung in der Ankerwicklung rechtzeitig ändert, um die Konstanz der Richtung des elektromagnetischen Drehmoments aufrechtzuerhalten.
Die Nennspannung des automatischen Lenkmotors für unbemanntes Fahren beträgt DC 12 V/24 V, die Steuerung erfolgt über RS232/CAN. Dank Servo-Design zeichnet er sich durch hohe Regelgenauigkeit aus und wird häufig in unbemannten Landmaschinen, Straßenbaufahrzeugen usw. eingesetzt.
Jinan Keya widmet sich der Forschung und Entwicklung von Servomotoren, Antrieben und anderen Produkten. Das Unternehmen setzt auf fortschrittliche automatisierte Produktionsprozesse und ein strenges Qualitätskontrollsystem, um seinen Kunden stets äußerst zuverlässige Produkte zu bieten.
Wir nehmen an der AGRITECHNICAin Hannover, Deutschland, vom 9. bis 15. November 2025 am StandNr.: 17F22b, besuchen Sie unseren Stand.