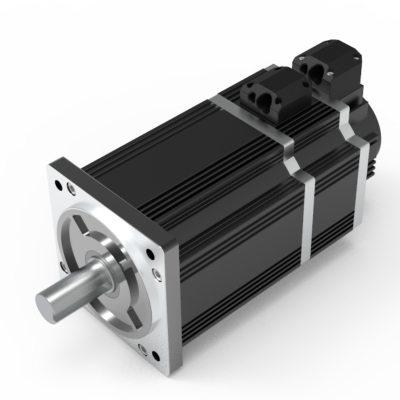

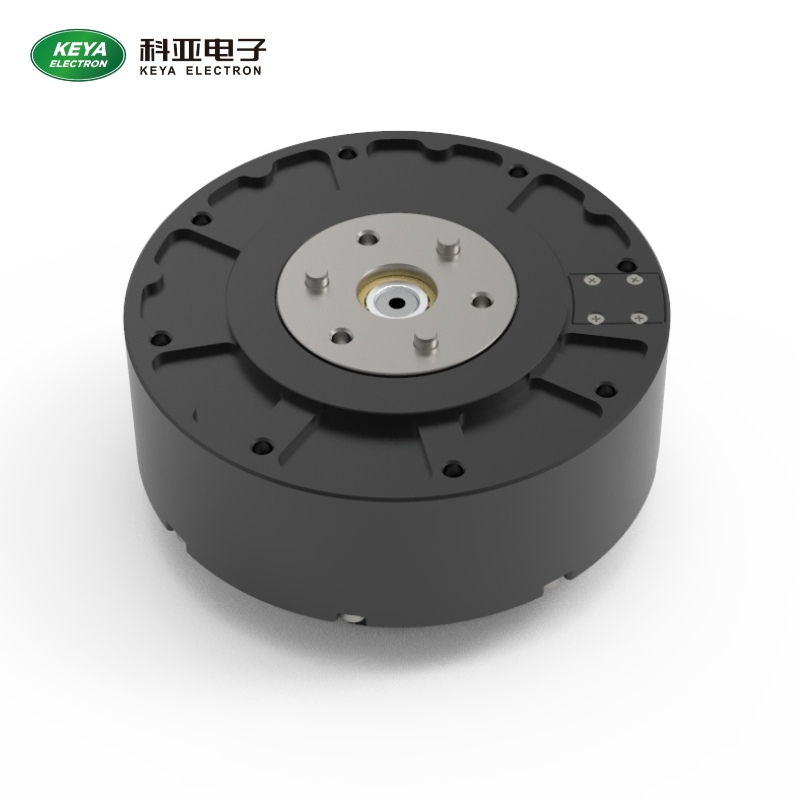
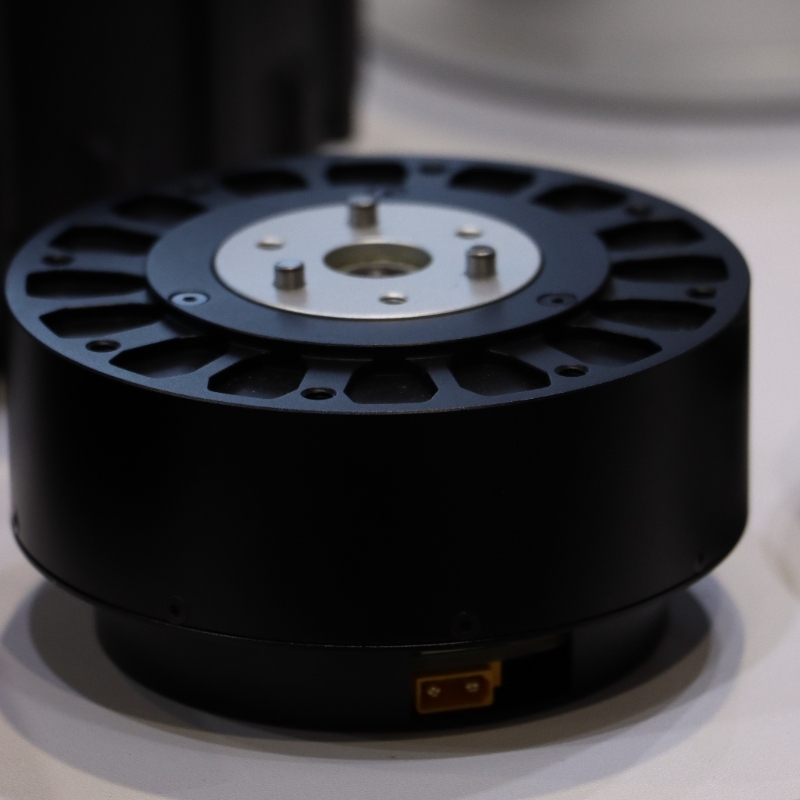
Roboter-Gelenkmotor
Nennspannung: DC48-96V
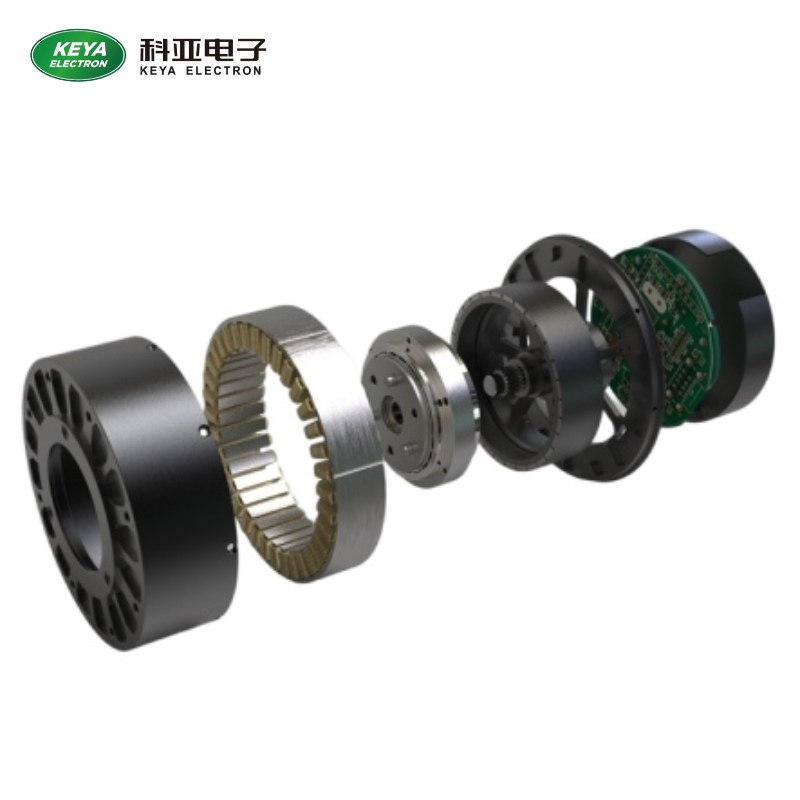
Vier-in-Eins-Gerät (integrierter Servomotor, Treiber, Encoder und Reducer) mit stabilem Lauf.
Niedrige Drehzahl, hohes Drehmoment, gute Dynamik und hohe Regelgenauigkeit.
Mehrere Schutzfunktionen sorgen für einen reibungslosen Betrieb.
Unterstützung der Anpassung.
Produktparameter:
Modell |
KY96BL04035-15 |
KY160BL0405-06 |
Parameter |
||
Nennspannung |
Gleichstrom 48V |
|
Nennleistung |
350W |
530W |
Nennstrom |
10,3 A |
18,5 A |
Ausgangsgeschwindigkeit |
258 U/min |
100 U/min |
Nenndrehmoment |
13N·m |
50 N·m |
Momentaner max. Strom |
20A |
37A |
Momentanes max. Drehmoment |
30N·m |
160N·m |
Anzahl der Pole |
30 |
32 |
Feedback-Teil |
Absoluter Drehgeber |
|
Steuerungsmethode |
RS232 / CAN2.0 / CANopen |
|
Untersetzungsverhältnis |
1:6 |
|
Arbeitsmodus |
Drehzahlmodus, Drehmomentmodus, Positionsmodus |
|
Gewicht |
0.85kg |
2.95kg |
Produktzeichnung: